The Future of Rehabilitation Robotics: A Framework for Human-Robot Interaction for Complete Training and Assessment
1. Project Summary
Stroke is a worldwide leading cause of physical disabilities. In Vietnam, the stroke incidence rate is about 161 per 100,000 persons per year, with over 150,000 patients recorded in 2021 [1]. The most common impairment after a stroke is hemiparesis, which reduces the ability to walk or perform the activities of daily living. Muscle weakness reduces autonomy and independence; as a result, more than half of stroke survivors need care from relatives or friends for their daily activities [2] Robot-assisted rehabilitation is a particular focus of assistive technology that enables functional recovery from mild to severe neurologic injuries with high training intensity, repetitiveness, and adaptive support. Although pioneering technologies in rehabilitation robotics have been developed since the late 90s, there is no consensus on optimal robot-assisted therapy for stroke survivors [3]. This is due to the lack of knowledge of functional recovery for individuals with muscle weakness and difficulties in accessing and transferring healthcare needs into design considerations. For example, a global therapy program is characterized by multistage rehabilitation from complete and partial assistance to resistance [4]. Complete assistance requires an external force to coordinate human legs relevant to a desired movement trajectory. This stage is typically devoted to patients with severe neurologic impairment. For partial assistance, an external force is added to assist or support the leg movement, as patients cannot use their effort to move the legs. Resistance implies processes that enhance the patient’s ability to correct the leg movement under an external force. However, most exoskeleton robots are designated for only one stage (either complete assistance, partial assistance or resistance). Patients must be trained with multiple robots to complete a global therapy program, which is time-consuming and cost-ineffective [5]. This research project will explore cutting-edge technologies in robotics, physical human-robot interaction, artificial intelligence (AI), and rehabilitation engineering to develop a novel exoskeleton robotic system to achieve complete training. This research will clarify the up-to-date design philosophy, redefine the definition of robots and intelligence means for multistage rehabilitation, and assess physical human-robot interaction to offer safe, robust, and reliable training with shared control (user preference and clinician prescription). If successful, the invented technologies will benefit the healthcare and robotics industries, transforming multistage rehabilitation from therapist-guided to robot-guided treatment.
2. Specific Aims
- Aim 1: Develop an exoskeleton robotic system integrated with hybrid stiffness actuators (HSAs) for multistage rehabilitation. The robot can properly assist or resist the movements of individuals with muscle weakness and lower-limb impairment during therapy training.
- Aim 2: Propose an AI-powered control method for the robot based on the user’s motion intentions. This method enables the robot to learn the natural movements of healthy subjects via the information on the joint angles, velocities, torques, and electromyography (EMG) signals. From this information, it can detect the target user’s activities with a trained classifier and then provide appropriate control policies for intended exercises.
- Aim 3. Validate the proposed design and control methods through experiments and clinical studies with stroke survivors or patients with muscle weakness. The data measured on the robot, patient’s performance, and behaviors will be analyzed and assessed to demonstrate the success of the exoskeleton robot and the significance of the research.
3. Significance
This project will solve the problem of multistage rehabilitation for the long term and make the created technologies accessible to physical therapists and individuals with muscle weakness or lower-limb impairment. More specifically, this research will:
Increase the quality and time efficiency of rehabilitation treatment by introducing a novel exoskeleton robotic system to pursue a global therapy program. Rehabilitation with the proposed robot will no longer be dedicated to patients with a specific neurologic disease but to those with different impairment levels.
Improve energy efficiency and adaptability of robot-assisted rehabilitation by integrating a new type of compliant actuator (HSA) into the robot. These benefits are achieved as the HSA can provide active positive and negative stiffness for complete assistance and resistance, respectively, and passive stiffness for partial assistance.
Enhance safety, autonomy, and user-friendliness for multistage rehabilitation through the introduction of an AI-powered technique for multiple control modes. Here, a data set for learning is created from the information on human joint angles, velocities, joint torques, and EMG signals of healthy subjects.
4. Approaches
The outcome of this research will be an exoskeleton robotic system for multistage rehabilitation and an AI-powered control and learning framework based on the estimated user’s intentions, as illustrated in Fig. 1. Our robot will consist of three components, including the body weight support, lower-limb exoskeleton with hybrid stiffness actuators, and AI-powered control.
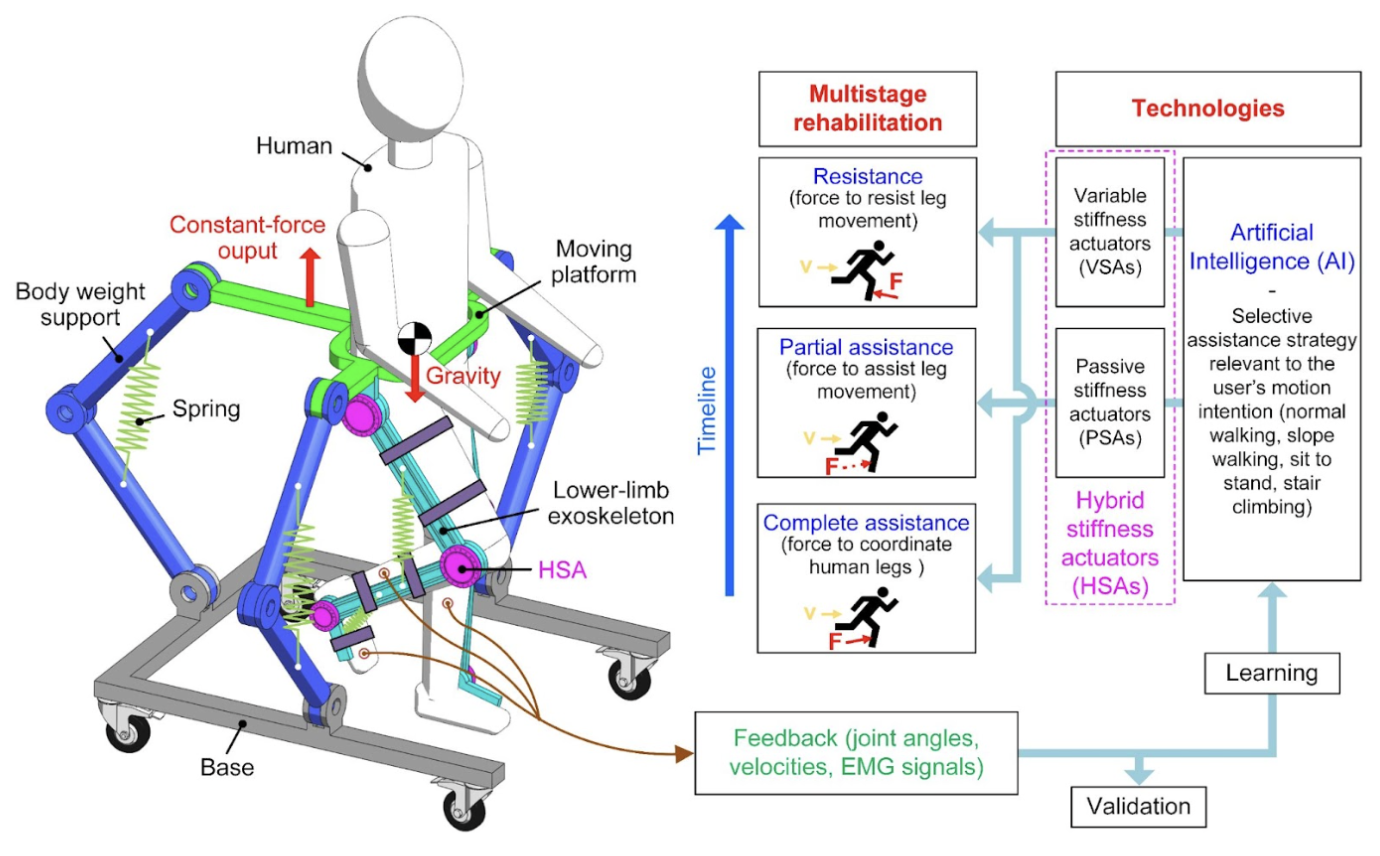
Figure 1. The anticipated exoskeleton robotic system for multistage lower-limb rehabilitation.
4.1. Body weight support (BWS)
Body weight support (BWS) is a device that adjusts the training conditions of therapies by reducing the gravity effect on the human joints and enhancing stability with external assistance [6]. A BWS enables physiotherapists to correct the gait patterns of patients during training intervention [7]. BWSs are generally designed with an overhead suspension system with springs and strings. This system can generate a vertical force that is acceptable for normal walking but not desirable as the elevation of the human center of mass changes during motion.
This change leads to an error in the supporting force, which is usually ignored, making it difficult to comprehensively detail the effectiveness of BWS. Because of the elevation change, it is more challenging to apply an overhead suspension system for sit-to-stand, slope walking, or stair climbing exercises. In this project, we will adopt a constant-force mechanism (CFM), which was presented by Dr. Nguyen Vu Linh [8] (Fig. 2), to construct a BWS to overcome the disadvantages of an overhead suspension system. The CFM provides a constant force over a range of displacements, which is viewed as a supporting force exerted on the human body. This force is unchanged even when the elevation of the human mass center varies during sit-to-stand, slope walking, and stair climbing exercises. Moreover, the output force level can be adjusted, enabling the BWS to cope with different human weights and increasing the adaptability of the device.
Figure 2. The CFM proposed for the BWS [8].
4.2. Lower-limb exoskeleton with hybrid stiffness actuators (HSAs)
This research will conceptualize and adopt a new type of compliant actuator (HSA) to build the exoskeleton robot. The HSA concept is realized by combining a variable stiffness actuator (VSA) and a passive stiffness actuator (PSA), as detailed in Fig. 3. By taking the features of both VSA (safety, high adaptability, robustness, force bandwidth [9]) and PSA (torque/energy reduction [10]), HSAs enable the robot to conduct multistage rehabilitation. In an HSA, one side of the output link (with a load) is connected to a sub-VSA part (Fix. 3(b)) and another to a sub-PSA part (Fix. 3(c)).
The sub-VSA part is made by a double-four-bar mechanism with two linear springs in which the lever concept is adopted to adjust the transmission of elastic force, making the output stiffness varied. A triple-four-bar mechanism with three springs is chosen for the sub-PSA part, which can offer a lightweight and portable solution for the robot due to its simple structure and assembly.
(a) CAD model (b) Sub-VSA part (c) Sub-PSA part
Figure 3. The anticipated HSA for the exoskeleton robot.
4.3. AI-powered control
With machine learning, robots can learn human characteristics data, predict human intentions, and provide a suitable control strategy to ensure safety and high effectiveness [11-13]. In this research, we will develop an AI-powered control method (Fig. 4) for the robot to treat patients suffering from mild to severe neurologic injuries. A data set for learning is created from the information on human joint angles, velocities, joint torques, and EMG signals. These data are collected through experiments with healthy subjects of different ages and motions (walking, sit-to-stand, stair climbing, etc.). The human joint angles and velocities will be measured using a motion capture system and gyroscope sensors. We will derive the state-space kinematic and dynamic models of the integrated human-robot system to estimate the joint torques. To estimate the user’s intentions, we adopt a learning framework from positive and unlabeled data (PU-learning). In this framework, data from normal walking, slope walking, sit-to-stand, and stair climbing motions are labeled as the target motions and unlabeled data for other motions. A trained classifier is created to estimate the user’s intentions for these motions. The iterative linear-quadratic-Gaussian (iLQG) is adopted to build control policies for the robot. We also use a proportional-integral-derivative (PID) controller integrated with a linear quadratic (LQ) optimal algorithm and Kalman filter to control the robotic system.
Figure 4. The proposed AI-powered control method.
- Innovative Technology
- Innovations in robot design: (i) a body weight support (BWS) that enables patients to conduct different exercises (walking, sit-to-stand, stair climbing, etc.); (ii) a novel architecture of a robotic system for multistage rehabilitation.
- Innovation in actuators: a new type of compliant actuator (HSA) that provides active positive and negative stiffness suitable for complete assistance and resistance, respectively, and passive stiffness for partial assistance. HSA can also offer high safety, energy efficiency, adaptability, and flexibility.
- Innovation in data acquisition: a new data set (focusing on Vietnamese people) that includes the human joint angles, velocities, joint torques, and EMG signals used for motion analysis and control.
- Innovations in control and intelligence: (i) a PID controller integrated with a linear quadratic (LQ) optimal algorithm and Kalman filter for rehabilitation training; (ii) a learning framework from positive and unlabeled data (PU-learning) in which data from normal walking, slope walking, sit-to-stand, stair climbing motions are labeled as the target motions and unlabeled data for other motions
6. Collaboration Schedule
The PIs from VinUni, UIUC, and Vinmec will work together on conceptualization, mechanical analysis and design, adaptive control, collection of data training, training and testing of machine learning program, signal processing, rehabilitation techniques, prototype and validation. ABB Robotics Vietnam will be an industry partner, supporting us in building and testing the robotic system. The PIs and their teams will have regular video-conferencing meetings, at least one session per month, to discuss the project orientation, report the progress of their teams, and contribute to the planning of student work. Annual meetings can be face-to-face, e.g., at conferences, workshops, or via international visiting programs (such as Vietnamese visiting scholar program or Fulbright U.S.-ASEAN visiting scholar program). This project will include 12 main activities, as detailed below.
(table here)
7. Expected Outcomes
7.1. Traning and mentoring
This project will initiate new career perspectives and improve working conditions for VinUni and UIUC students, faculties, and Vinmec researchers. VinUni undergraduates who have been involved in this research (Chau Hoang Phuc, Hoang Tuan Minh, To Dong Anh Khoa, Nguyen Thanh Lam) since February 2023 under the supervision of Dr. Nguyen Vu Linh will be considered excellent candidates to join a joint VinUni-UIUC Ph.D. program. Their research outcomes have recently been accepted for presentation at “the 7th International Conference on Engineering Mechanics and Automation (ICEMA 2023)” in Hanoi, Vietnam. A total of 5 Ph.D. students and one postdoc will be recruited to join this project. At VinUni, students will be trained by Dr. Nguyen Vu Linh to learn knowledge and skills in mechanical design, robotics, and the application of AI in robotics. Prof. Tran Trung Dung and Dr. Ho Ngoc Minh will guide students to use medical devices and equipment at Vinmec (Vicon motion capture system, treadmill, EMG sensors, biomechanics measurement series, etc.) for data collection, analysis, and training processes. At UIUC, Prof. Yih-Kuen Jan will guide students on musculoskeletal injuries and rehabilitation techniques. Students will have opportunities to study age-related and disease-related changes in postural control, behavioral and neural mechanisms underlying postural and gait dysfunction, nonlinear dynamical analysis of short and noisy time series data, and machine learning from Prof. Manuel Enrique Hernandez. Besides, Prof. George Heintz will support student learning and work on health data analytics, biological modeling, algorithm design, and software development for AI-powered control. After completing the project, the participants can exploit the knowledge and skills they gained throughout the period to promote their careers or support their advanced studies and further collaborations. This project also creates a channel for researchers from different fields to exchange knowledge and experiences, learn from each other, and explore new technologies together.
7.2. Publications and Patents
Students involved in this project must contribute significantly to multidisciplinary topics from machine design, robotics, signal processing, intelligent systems, data analysis, algorithm design, rehabilitation engineering, and assistive technologies. To meet UIUC graduation standards, each Ph.D. student must publish at least three Q1 journals as a leading author and one US patent. Undergraduates, Master’s students, and postdoc(s) can be involved in publications as co-authors. Other channels for delivering the research outcomes include book chapters, posters, conferences, workshops, and academic and industrial events.
7.3. Clinical studies
The clinical outcomes of this project are (i) increasing the quality and time efficiency of rehabilitation treatment, (ii) improving energy efficiency and adaptability of robot-assisted rehabilitation, (iii) enhancing safety, autonomy, and user-friendliness during rehabilitation training, (iv) raising human awareness and attitudes about healthcare robotics, and (v) improving national healthcare systems with quick and easy access to robot-assisted rehabilitation.
7.4. External Funding Proposals
The next step of this project is to integrate the results from this research into our future proposals to pursue international collaboration grants in health sciences or technologies. Some grant examples are NAFOSTED International Collaboration Program, VinIF Funding (Vietnam), and US Funding Opportunities for International Collaboration.
7.5. Technology Transfer Activities
The PIs will work closely with our industry partner (ABB Robotics Vietnam) to transfer the technologies developed in this project to the market, especially to local hospitals. Some activities for the technology transfer include (i) securing patents and intellectual property rights, (ii) joining up research with commercialization principles and strategies, (iii) creating a business plan, (iv) encouraging innovations and engaging in entrepreneurship for bringing a commercial product to market, and (v) securing funding for research and start-up.
8. Funding Plan
Funding is used to purchase devices and equipment to support the construction and experiments with the proposed robotic system. For instance, computers are necessary for students to conduct analysis, modeling, simulation, design, control, and programming activities. Force/torque sensors are used to measure the output force and torque of the actuators and robotic system, validating their performances before experimenting with them on humans. Funding is needed for purchasing mechanical parts (links, bushings, bearings, linear guides, screws, washers, wheels, etc.), electrical and electronic tools and components (motors, controllers, power suppliers, encoders, gyroscopes, voltmeter, batteries, cables, screwdriver, saws, grinder, etc.), materials (3D-printer filaments, workpieces, etc.), and other supplies. Funding is requested for direct costs, e.g., documentation, software/training resources, manufacturing fees, supplies fees, clinical data collection, and lab facilities. Funding is also budgeted for travel fees to attend domestic/international conferences, workshops, and other academic/research events to support collaboration and research activities.
9. References
- D. T. Mai, X. C. Dao, N. K. Luong, T. K. Nguyen, H. T. Nguyen, and T. N. Nguyen, 2022, “Current state of stroke care in Vietnam,” Stroke: Vascular and Interventional Neurology, 2(2), e000331.
- J.-M. Belda-Lois, S. Mena-del Horno, I. Bermejo-Bosch, J. C. Moreno, J. L. Pons, D. Farina, M. Iosa, M. Molinari, F. Tamburella, and A. Ramos, 2011, “Rehabilitation of gait after stroke: a review towards a top-down approach,” Journal of NeuroEngineering and Rehabilitation, 8, 66.
- R. Gassert, and V. Dietz, 2018, “Rehabilitation robots for the treatment of sensorimotor deficits: a neurophysiological perspective,” Journal of Neuroengineering and Rehabilitation, 15(1), 46.
- T. Proietti, V. Crocher, A. Roby-Brami, and N. Jarrasse, 2016, “Upper-limb robotic exoskeletons for neurorehabilitation: a review on control strategies,” IEEE Reviews in Biomedical Engineering, 9, 4-14.
- S. K. Manna, and V. N. Dubey, 2019, “A Portable Elbow Exoskeleton for Three Stages of Rehabilitation,” Journal of Mechanisms and Robotics, 11(6).
- K.-R. Mun, S. B. Lim, Z. Guo, and H. Yu, 2017, “Biomechanical effects of body weight support with a novel robotic walker for over-ground gait rehabilitation,” Medical & Biological Engineering & Computing, 55(2), 315-326.
- S. Apte, M. Plooij, and H. Vallery, 2018, “Influence of body weight unloading on human gait characteristics: a systematic review,” Journal of Neuroengineering and Rehabilitation, 15(1), 53.
- V. L. Nguyen, 2023, “Design of an adjustable constant-force mechanism using a geared Sarrus linkage and spring,” Mechanism and Machine Theory, 189, 105417.
- B. Vanderborght, A. Albu-Schäffer, A. Bicchi, E. Burdet, D. G. Caldwell, R. Carloni, M. Catalano, O. Eiberger, W. Friedl, and G. Ganesh, 2013, “Variable impedance actuators: A review,” Robotics and Autonomous Systems, 61(12), 1601-1614.
- S. Toxiri, A. Calanca, J. Ortiz, P. Fiorini, and D. G. Caldwell, 2017, “A parallel-elastic actuator for a torque-controlled back-support exoskeleton,” IEEE Robotics and Automation Letters, 3(1), 492-499.
- J. K. Mehr, M. Akbari, P. Faridi, H. Xing, V. K. Mushahwar, and M. Tavakoli, 2023, “Artificial‐Intelligence‐Powered Lower Limb Assistive Devices: Future of Home Care Technologies,” Advanced Intelligent Systems, 2200361.
- K. Denecke, and C. R. Baudoin, 2022, “A Review of Artificial Intelligence and Robotics in Transformed Health Ecosystems,” Frontiers in Medicine, 9, 795957.
- K. H. Al-Waeli, R. Ramli, S. M. Haris, Z. B. Zulkoffli, and M. S. Amiri, 2021, “Offline ANN-PID controller tuning on a multi-joints lower limb exoskeleton for gait rehabilitation,” IEEE Access, 9, 107360–107374.
This research project will explore cutting-edge technologies in robotics, physical human-robot interaction, artificial intelligence (AI), and rehabilitation engineering to develop a novel exoskeleton robotic system to achieve complete training. This research will clarify the up-to-date design philosophy, redefine the definition of robots and intelligence means for multistage rehabilitation, and assess physical human-robot interaction to offer safe, robust, and reliable training with shared control (user preference and clinician prescription). If successful, the invented technologies will benefit the healthcare and robotics industries, transforming multistage rehabilitation from therapist-guided to robot-guided treatment.